Skip to content
专注机器人、电气数智化
首页
公司简介
一站式服务
持证上岗
服务中心
工业机器人服务
变频服务
电气服务
新闻中心
联系我们
返回
ABB机器人——50056故障
Subtitle
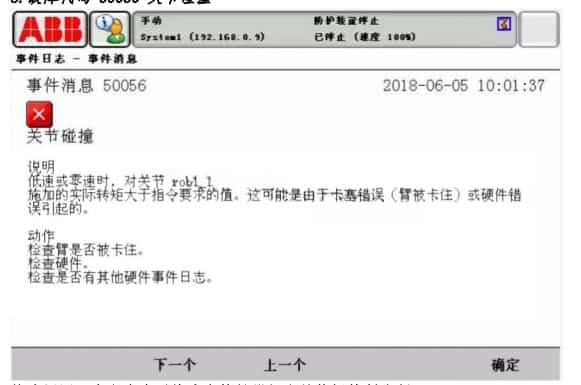
ABB机器人常见故障——50056 关节碰撞
说明
以低速或零速度工作时关节
arg
的实际转矩高于要求水平。可
能是由于阻塞 (手臂被卡住)或硬件故障造成的。
建议措施
检查手臂是否被卡住。
检查硬件。
Go to Top
Clear
搜索
导航菜单
首页
公司简介
一站式服务
持证上岗
服务中心
工业机器人服务
变频服务
电气服务
新闻中心
联系我们
微信
公众号
电话
13695801855